
Hola buenas noches, disculpa siguiendo este diseño sería factible que se alargara el brazo del centro para que tuviera un poco más de alcance el robot como por ejemplo, para una banda transportadora?
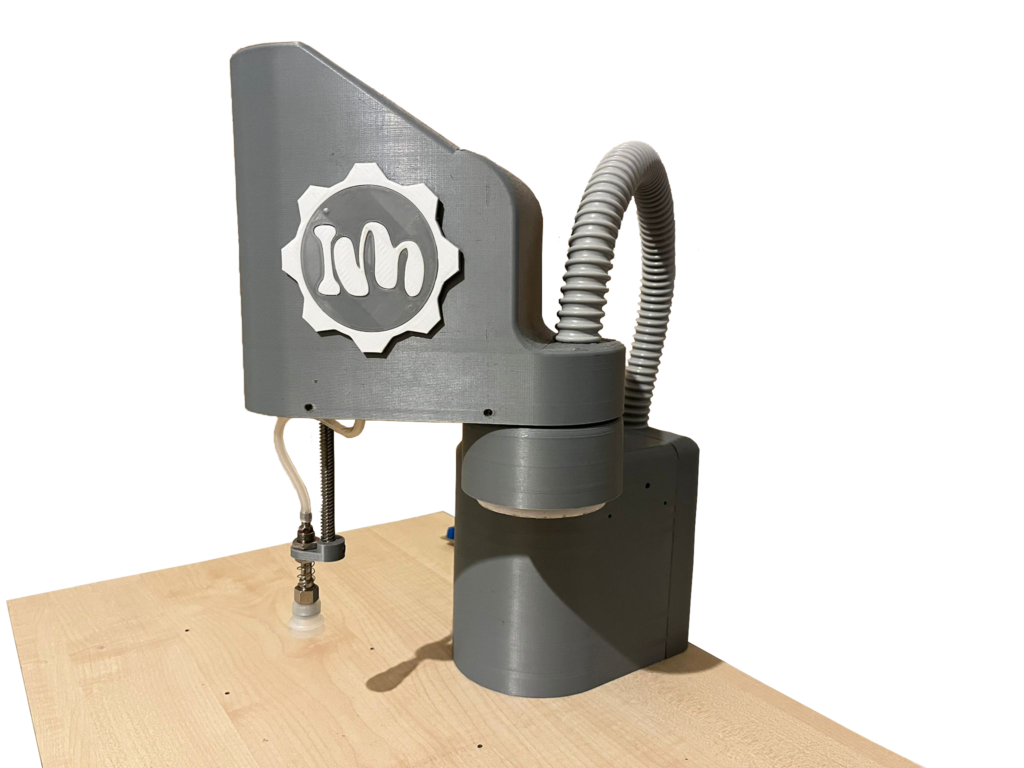
Robot Scara
El Robot SCARA es una clase especializada de robots industriales que se utilizan en una amplia variedad de aplicaciones de fabricación y automatización. Su capacidad para moverse con precisión en un plano horizontal, pero con una limitada flexibilidad en la dirección vertical. Esta característica los hace especialmente adecuados para tareas que involucran la manipulación de objetos en un plano bidimensional. Los robots SCARA se utilizan en una amplia variedad de aplicaciones, que incluyen la fabricación de productos electrónicos, la industria automotriz, la manipulación de materiales y la industria farmacéutica, entre otras. Su diseño compacto, velocidad y precisión los hacen ideales para tareas como ensamblaje, manipulación de piezas pequeñas, pick and place (recoger y colocar) y otras operaciones de montaje.
Tabla de contenidos
Robot Scara parte 1 – Base
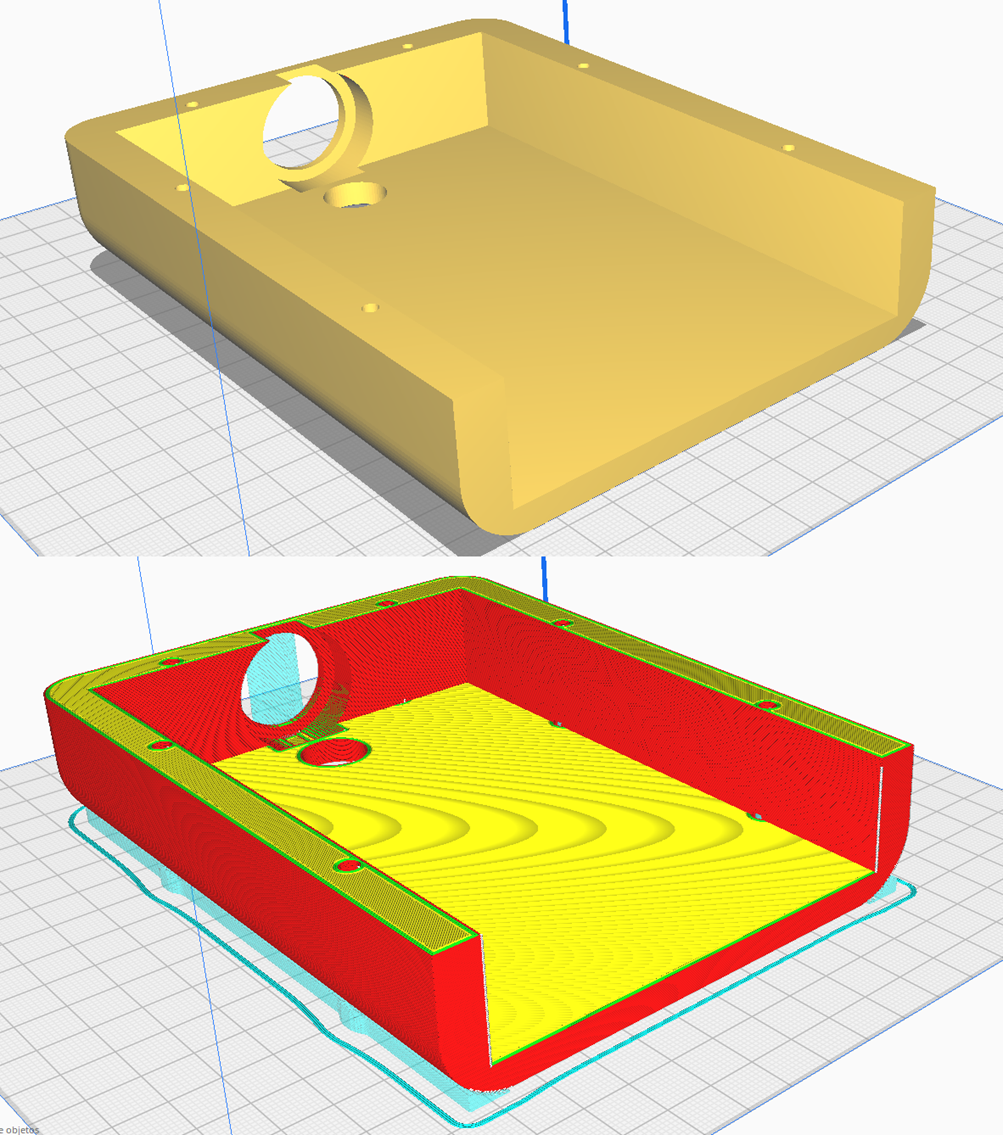
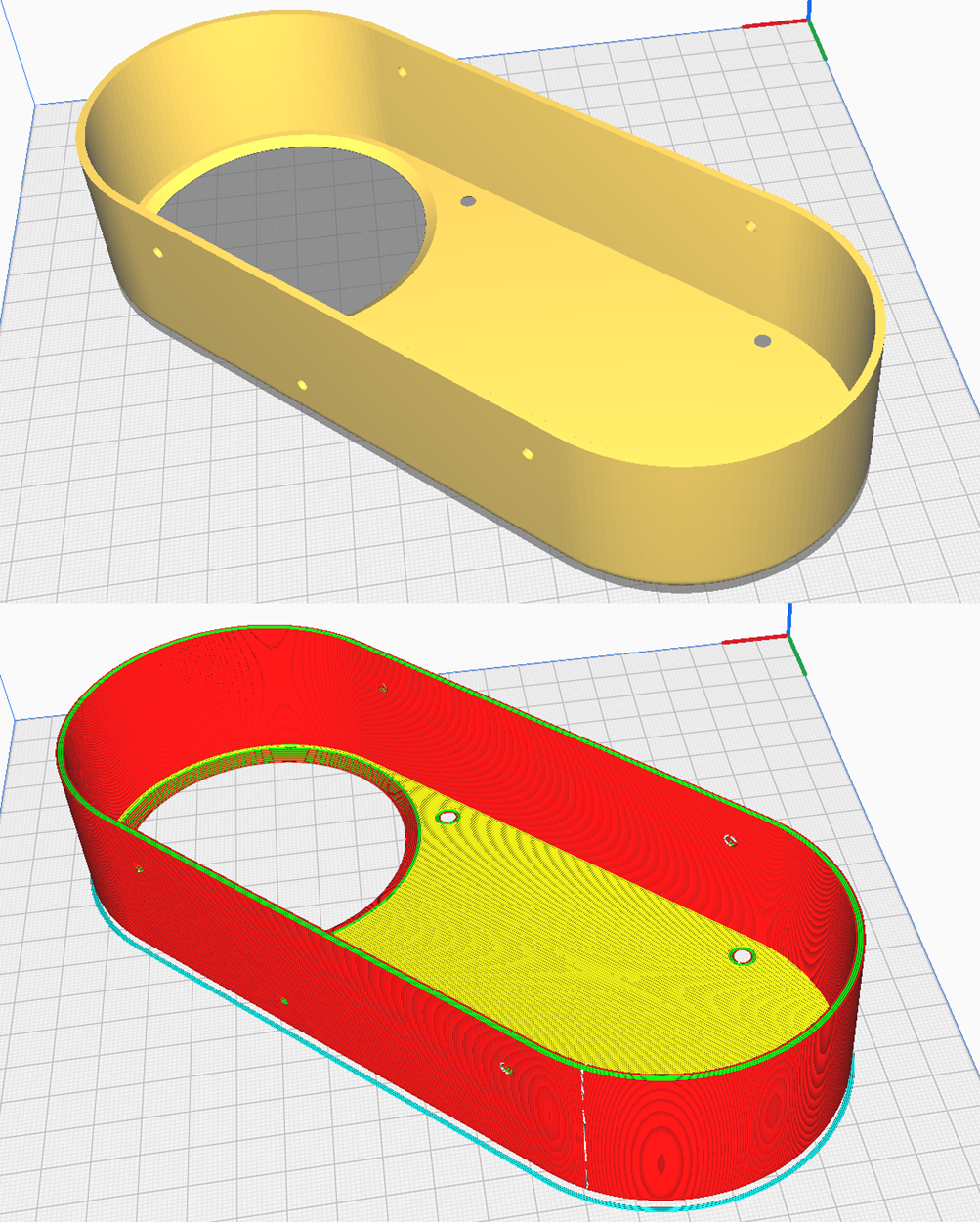
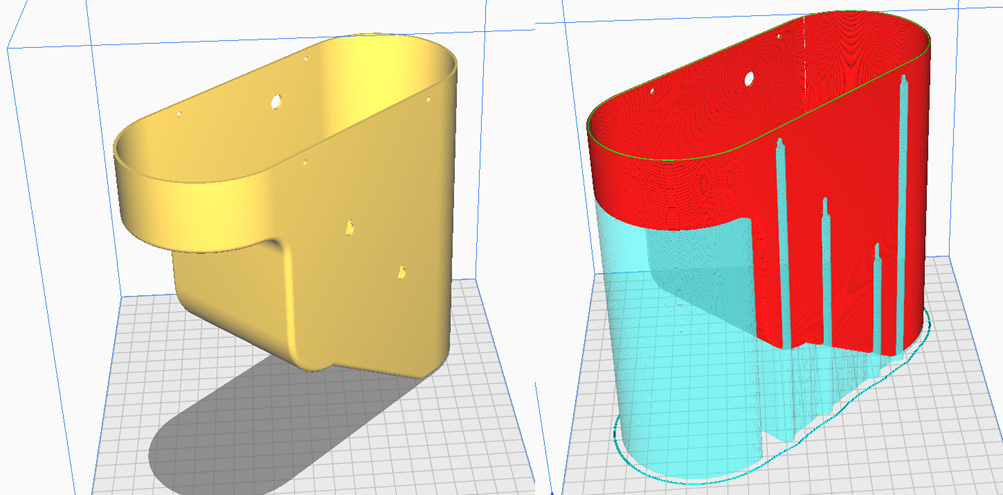
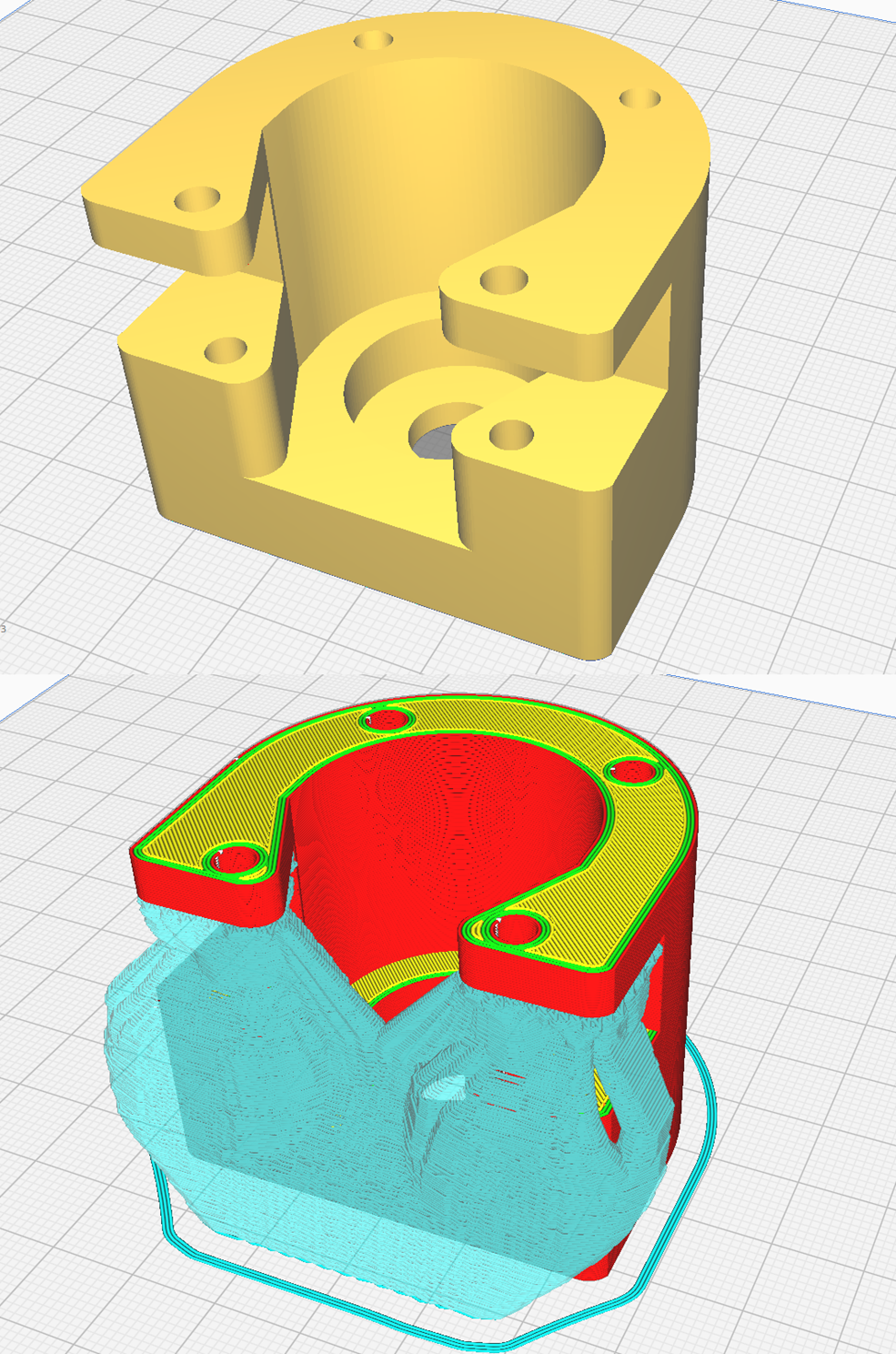
BASE ROBOT SCARA
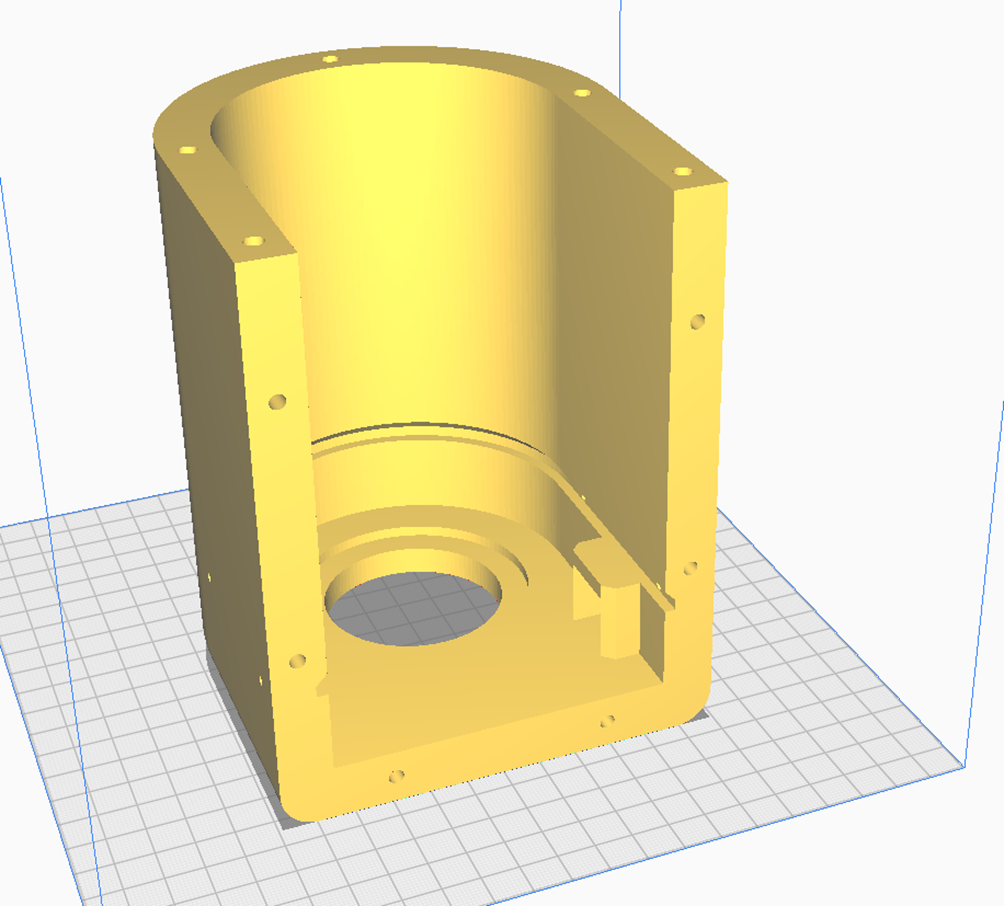
Material : PETG
Relleno : 50%
Soporte : SI – tocando la placa
En esta imagen podemos ver que colocamos soportes para poder hacer la capa donde ira el rodamiento.
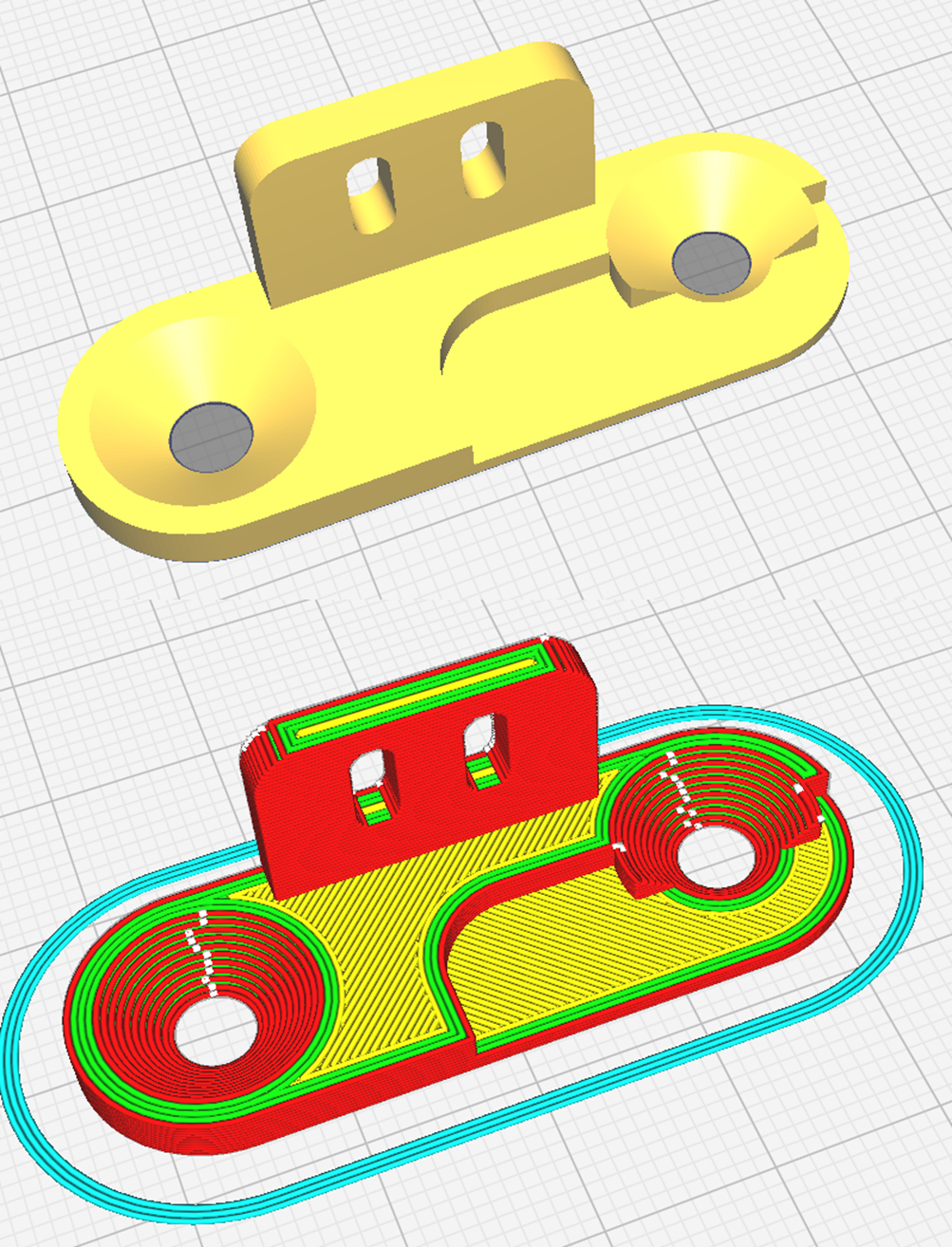
PIEZA PARA TENSAR MOTOR 1 Y MOTOR 2
Tener en cuenta que la pieza para tensar el motor 1 y motor 2 son diferentes pero van impresas de la misma manera.
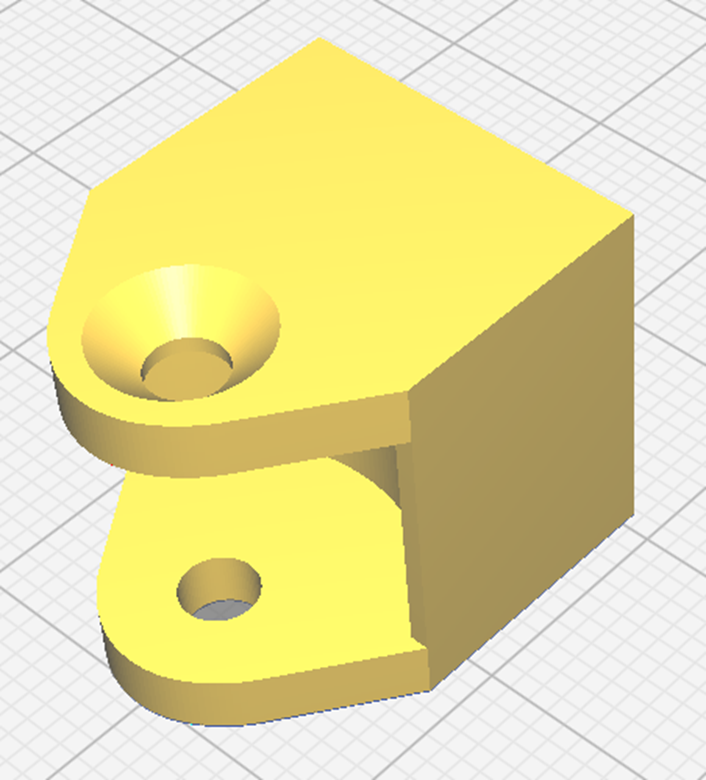
Material : PETG
Relleno : 100%
Soporte : SI – con soporte tipo arbol
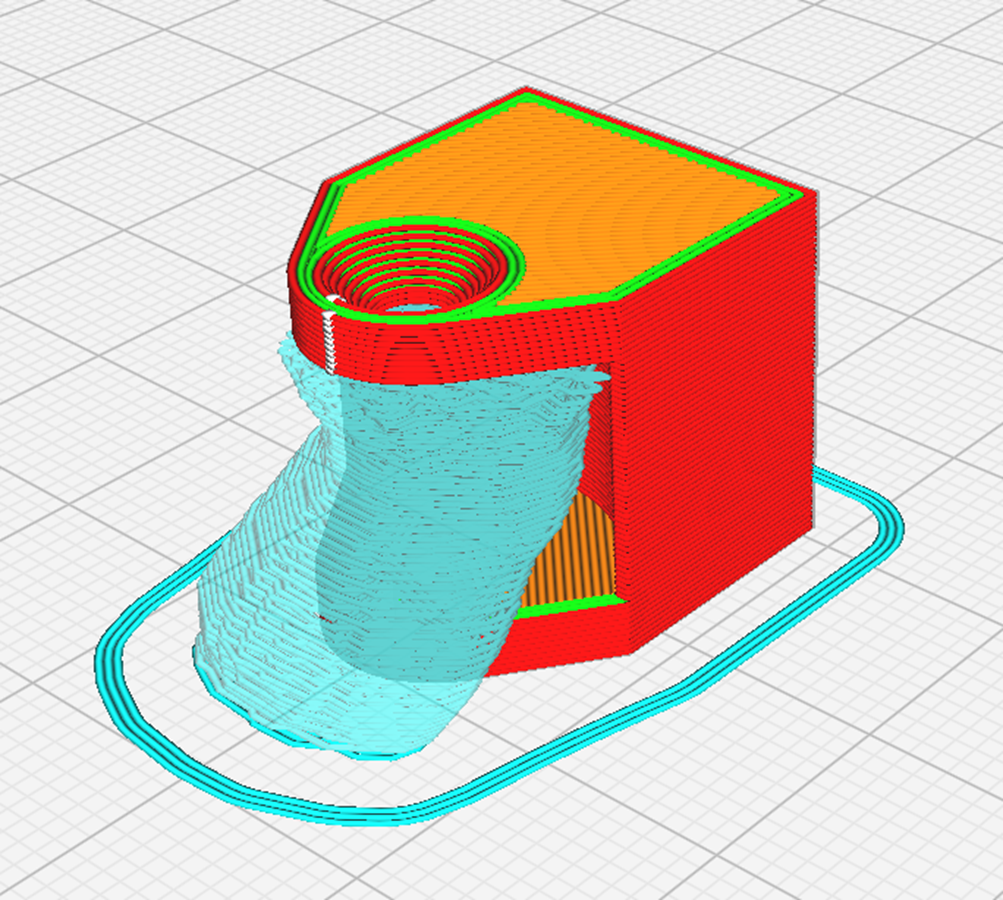
Esta pieza la hemos impreso de esta manera para que pueda aguanatar mejor a la hora de montarla en el robot, usamos soporte de tipo arbol.
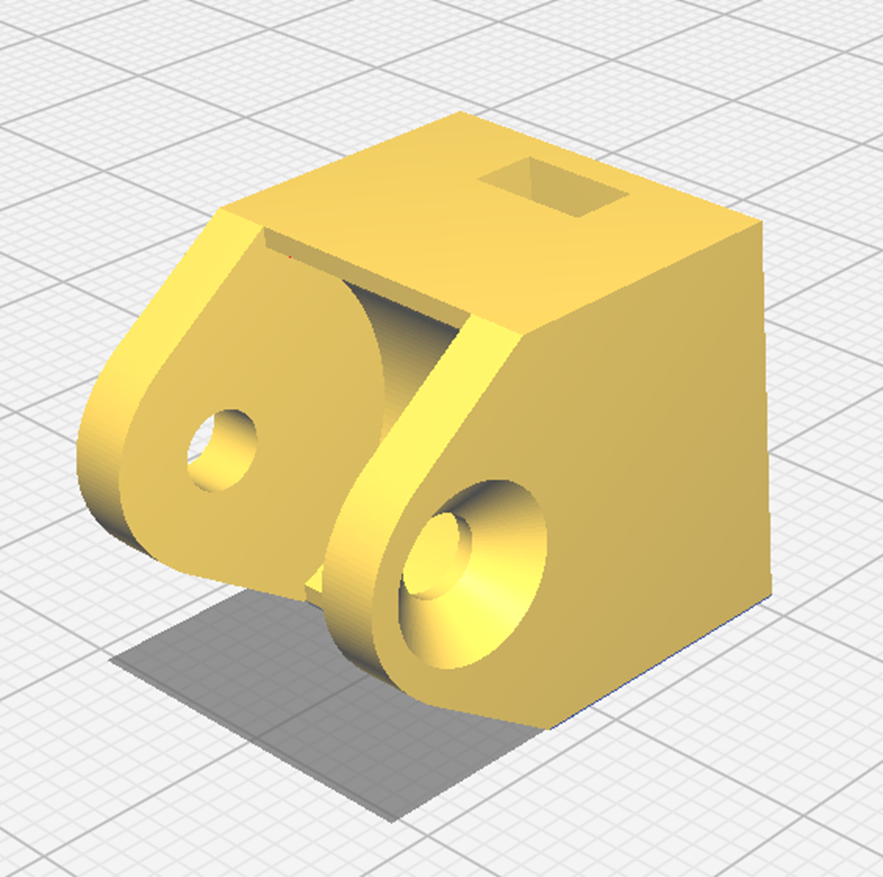
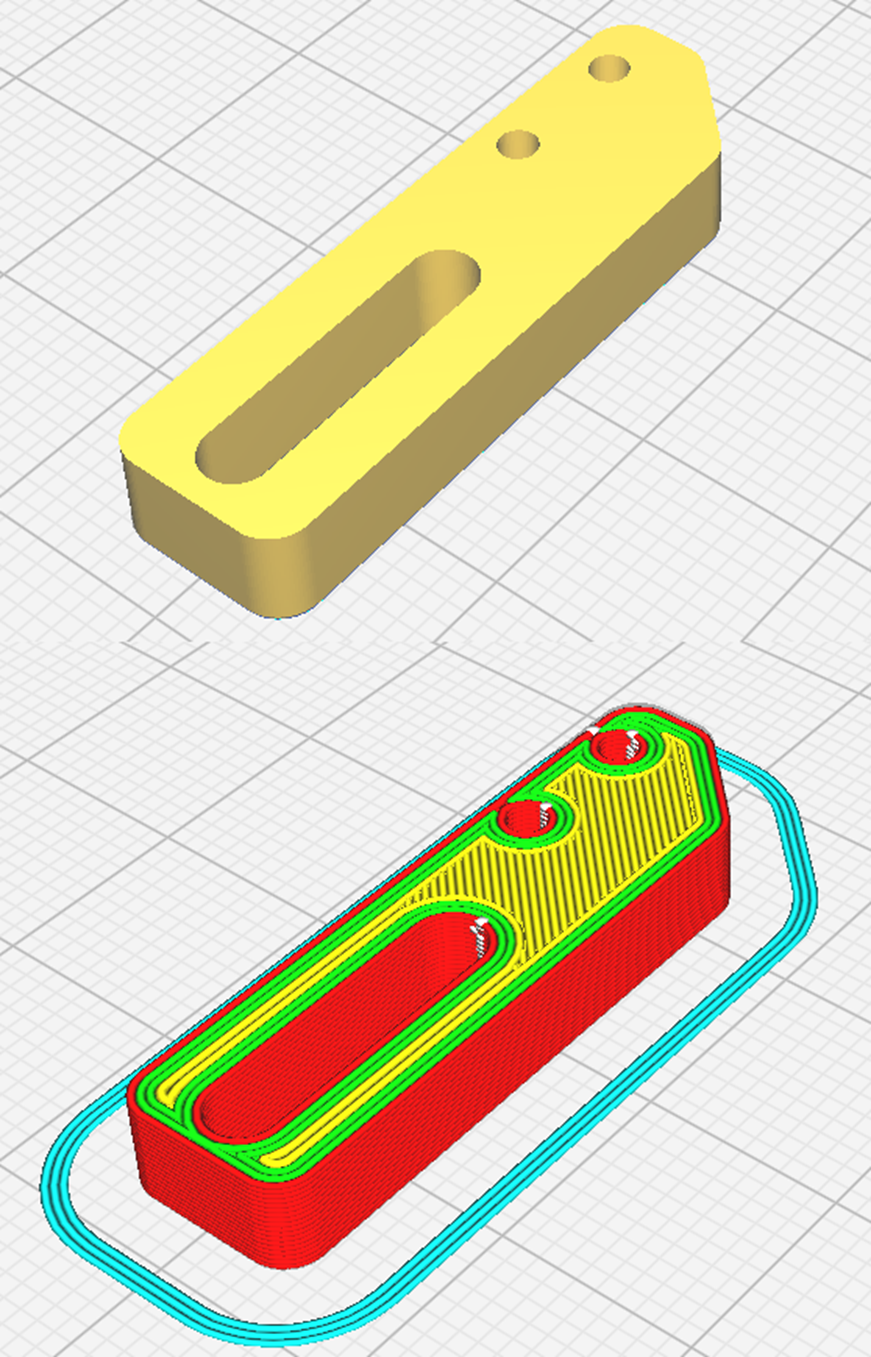
En caso no puedan imprimirlo de la manera anterior, pueden colocar la pieza como se muestra en esta imagen y poder imprimirla sin soportes.
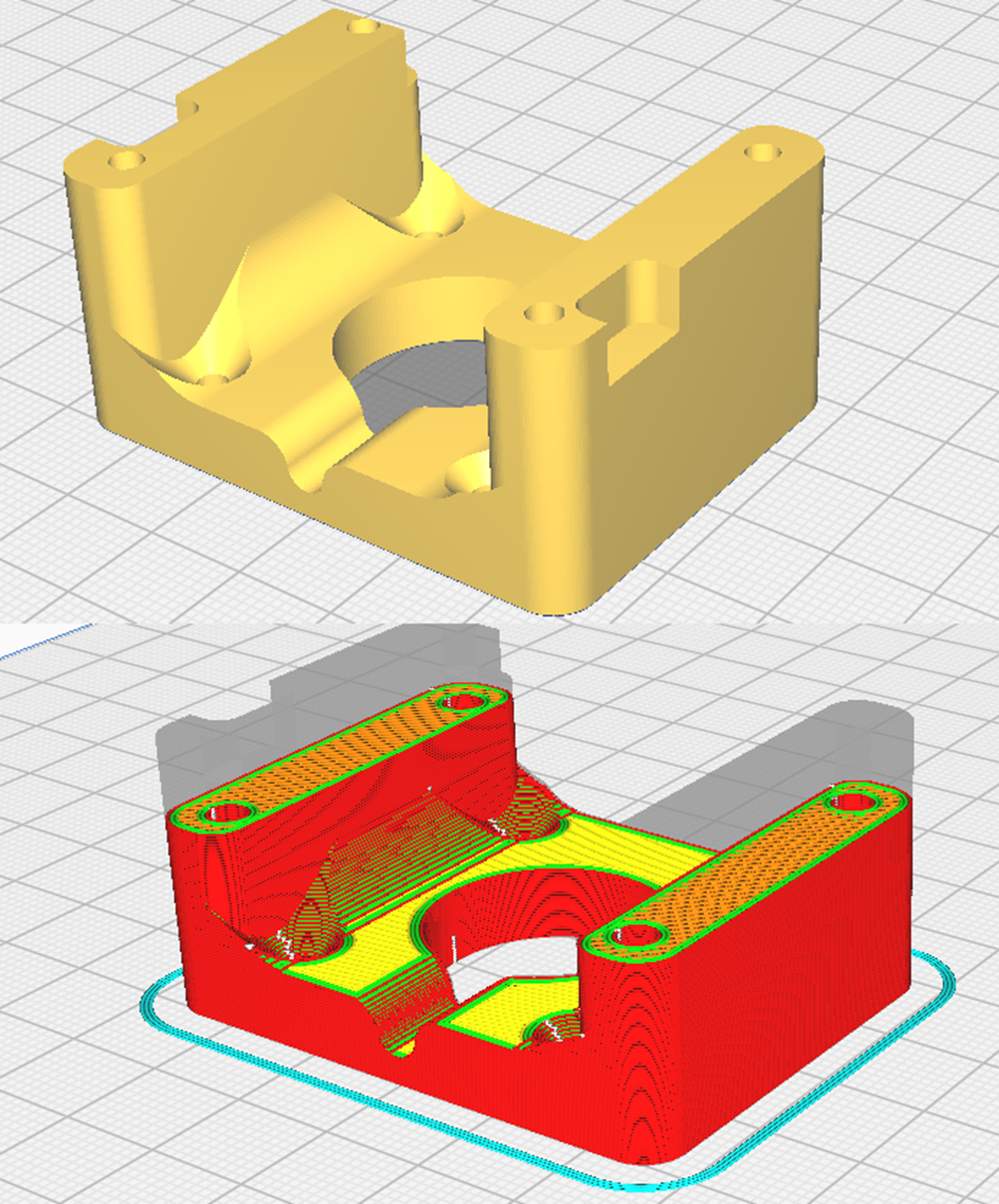
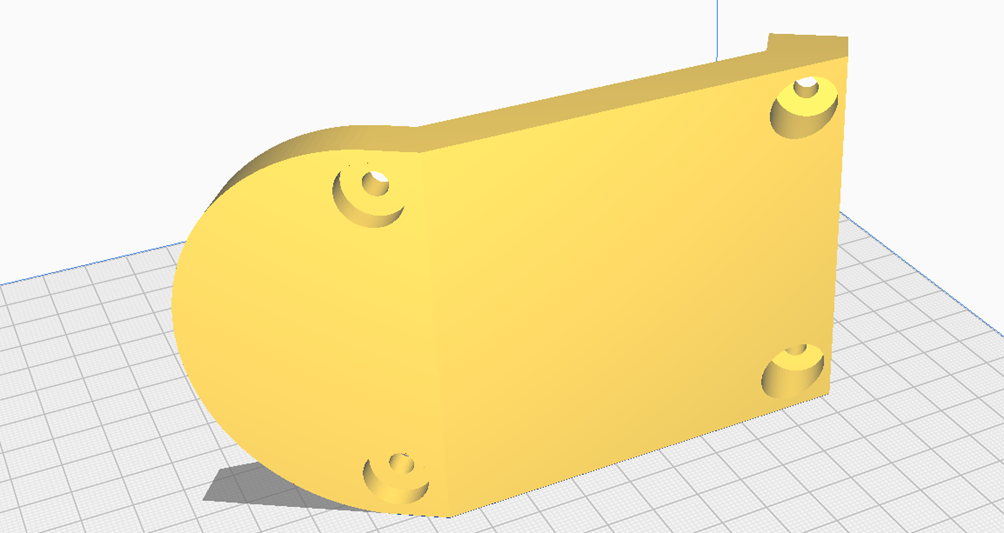
SOPORTE NEMA 17 (MOTOR 1 y MOTOR 2)
Material : PETG
Relleno : 100%
Soporte : NO
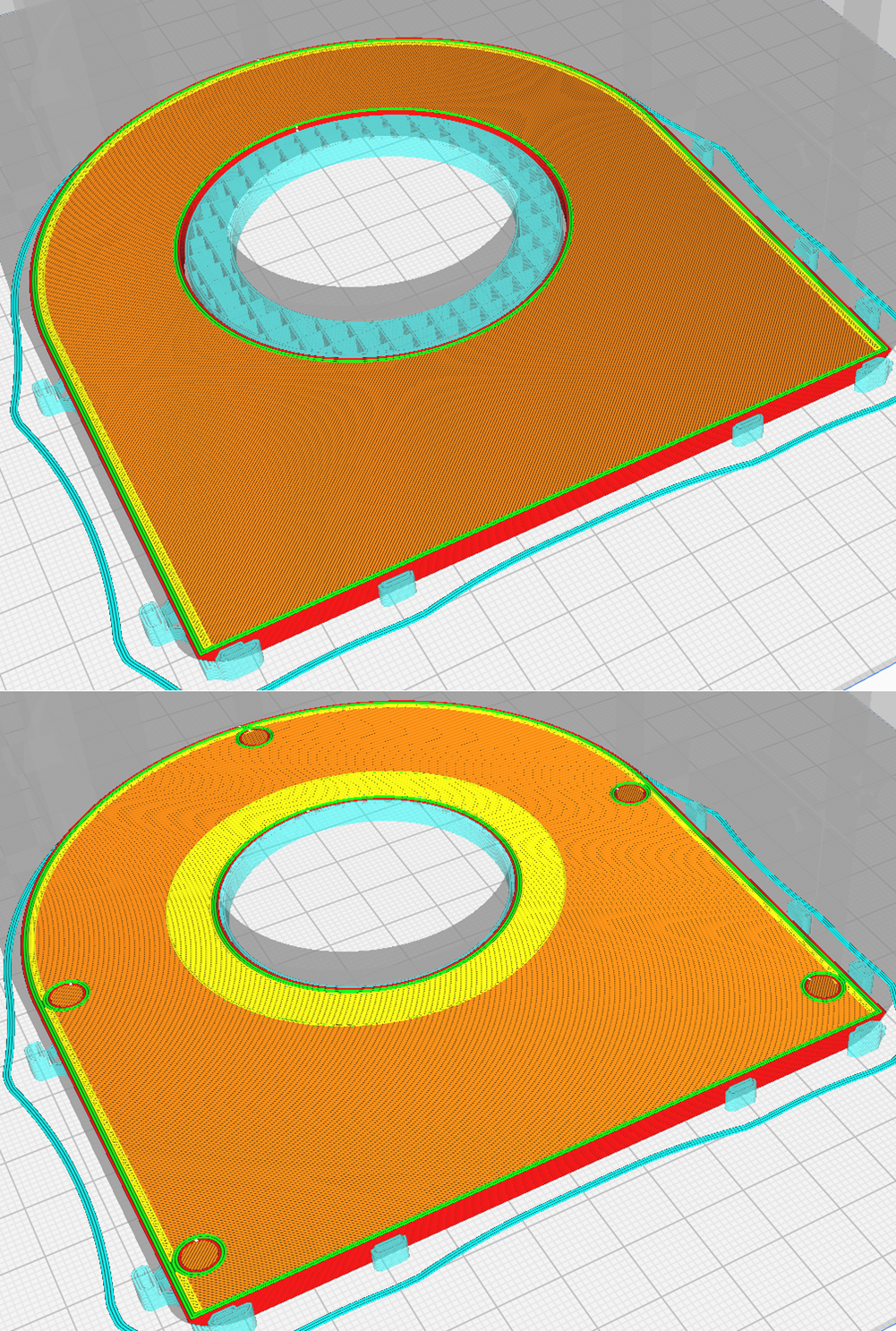
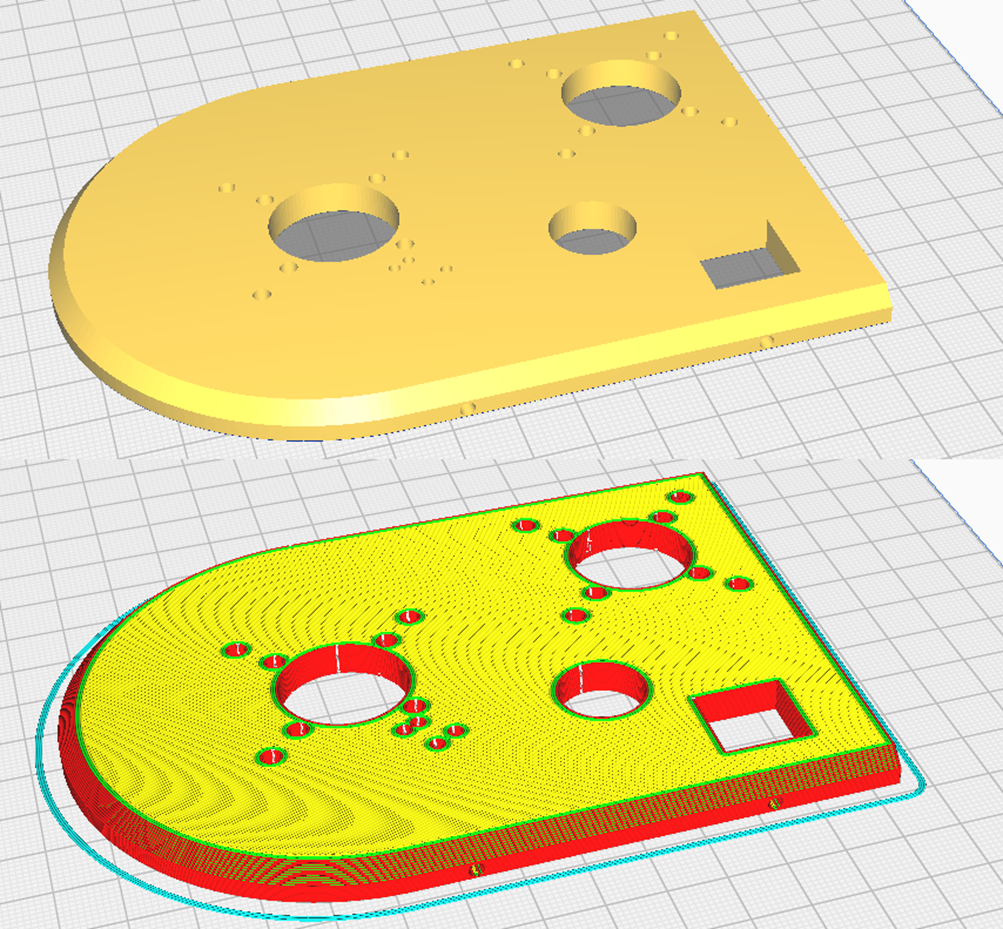
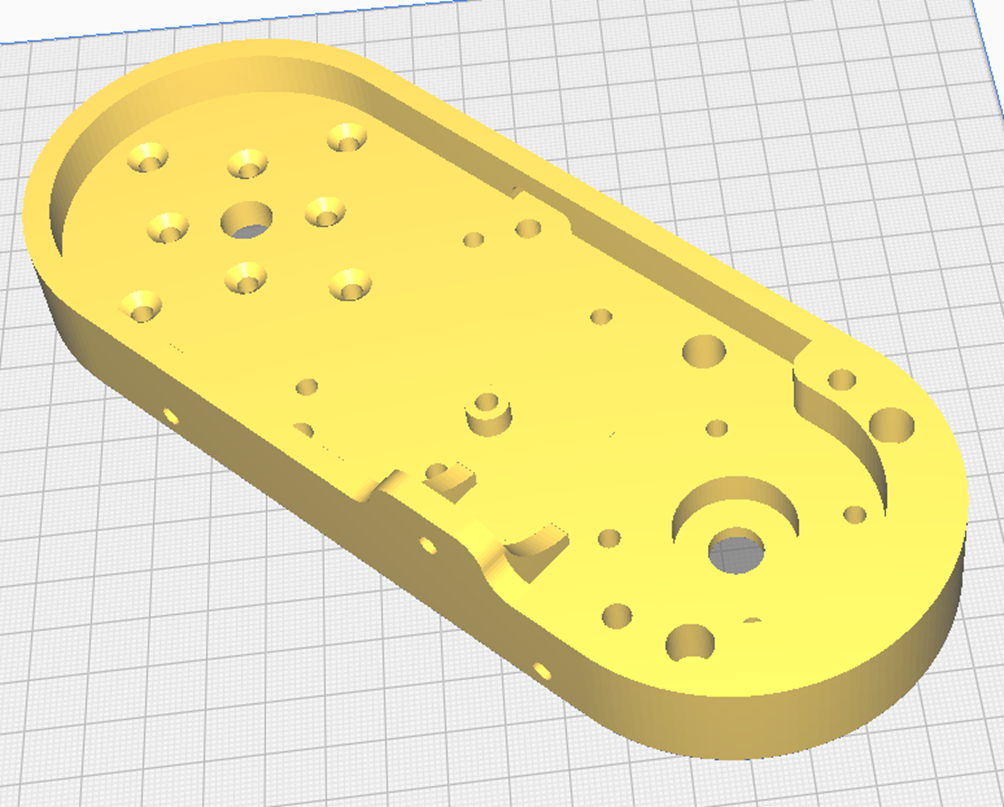
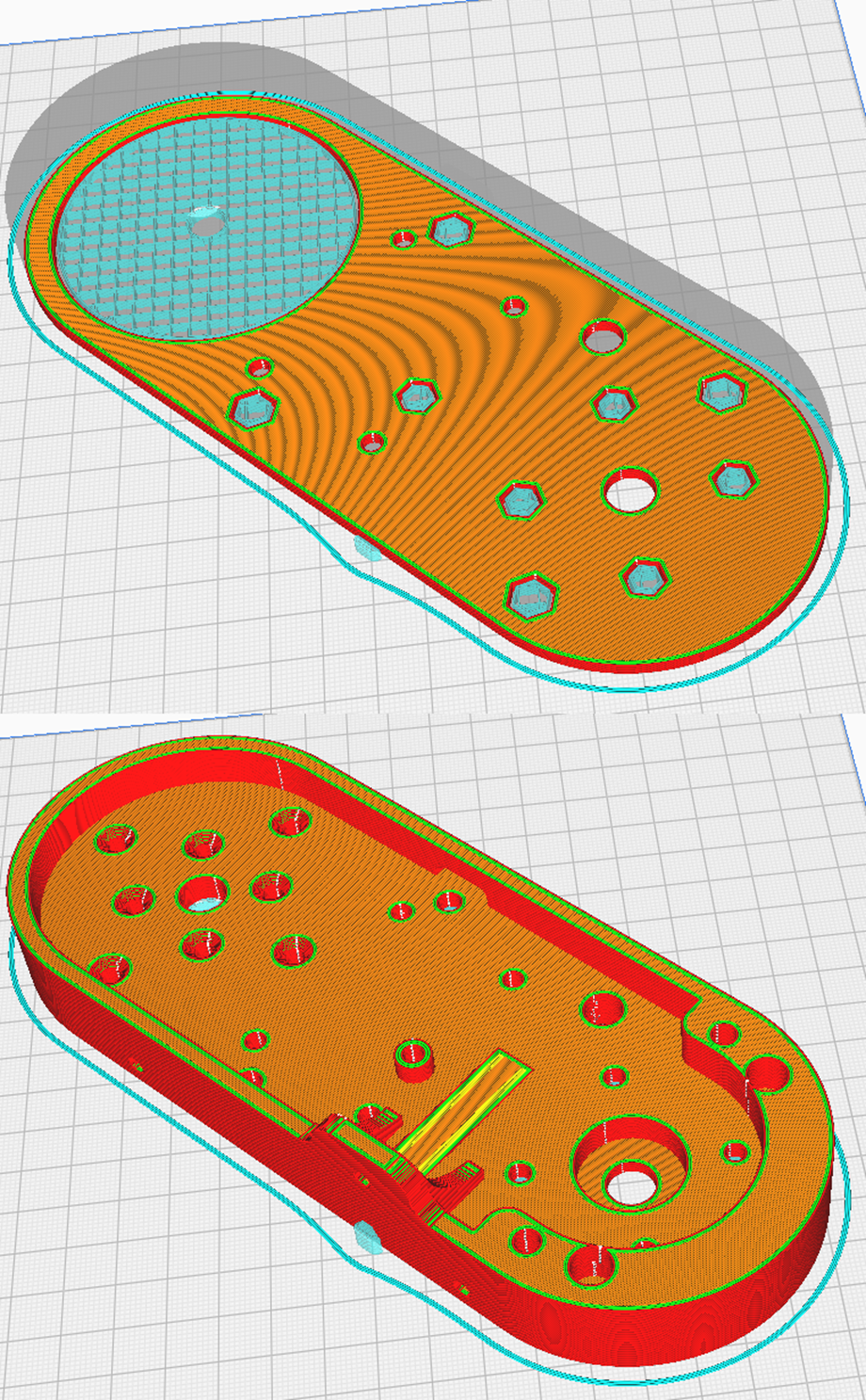
TAPA BASE
Material : PETG / PLA / PLA+
Relleno : 20%
Soporte : SI – tocando la placa
Robot Scara parte 2 – Primer Brazo
PRIMER BRAZO
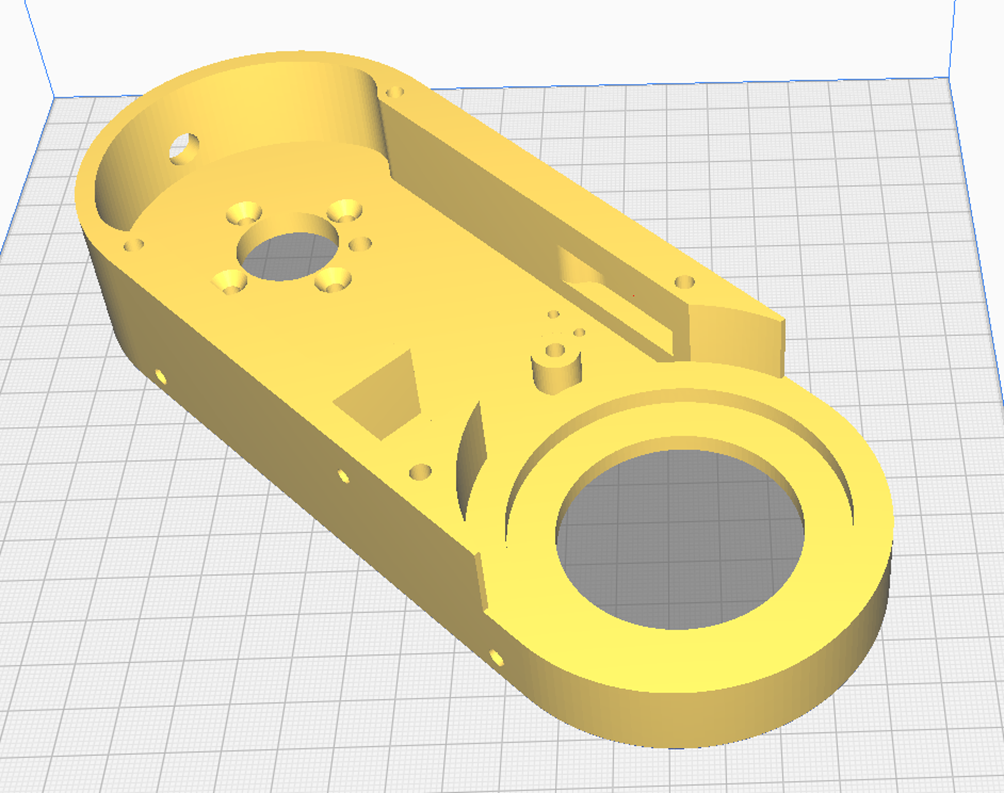
Material : PETG
Relleno : 100%
Soporte : SI – tocando la placa
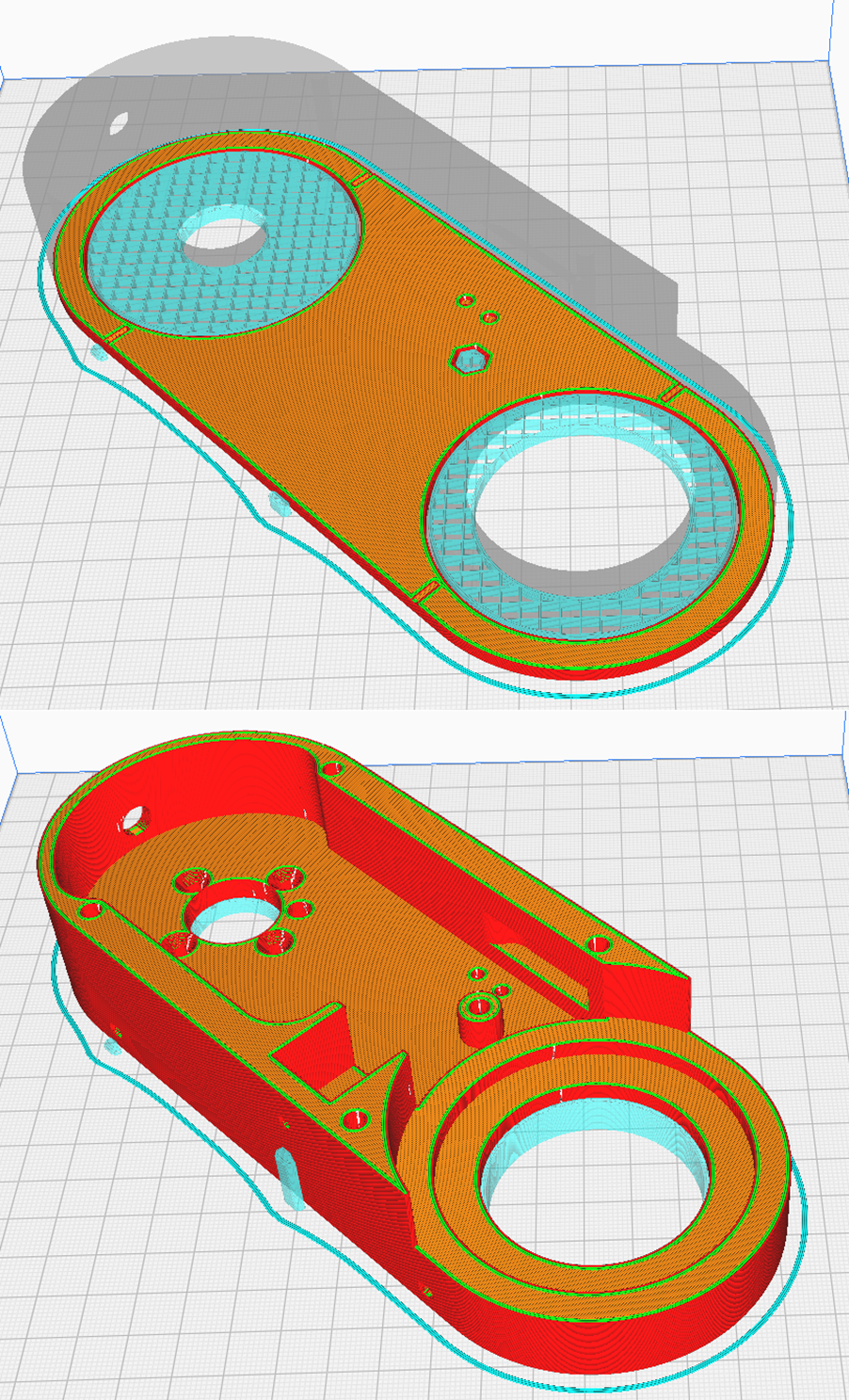
De igual manera para imprimir el primer brazo, necesitamos agregar soportes ya que iran colocados rodamientos.
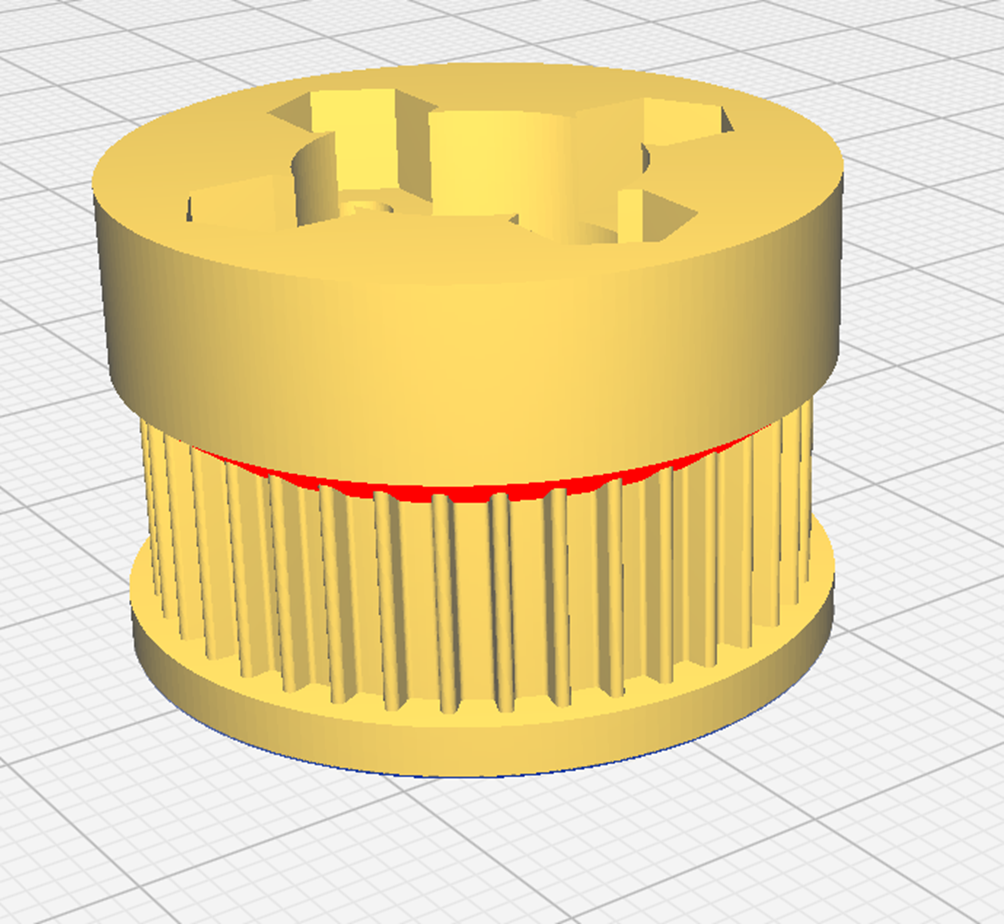
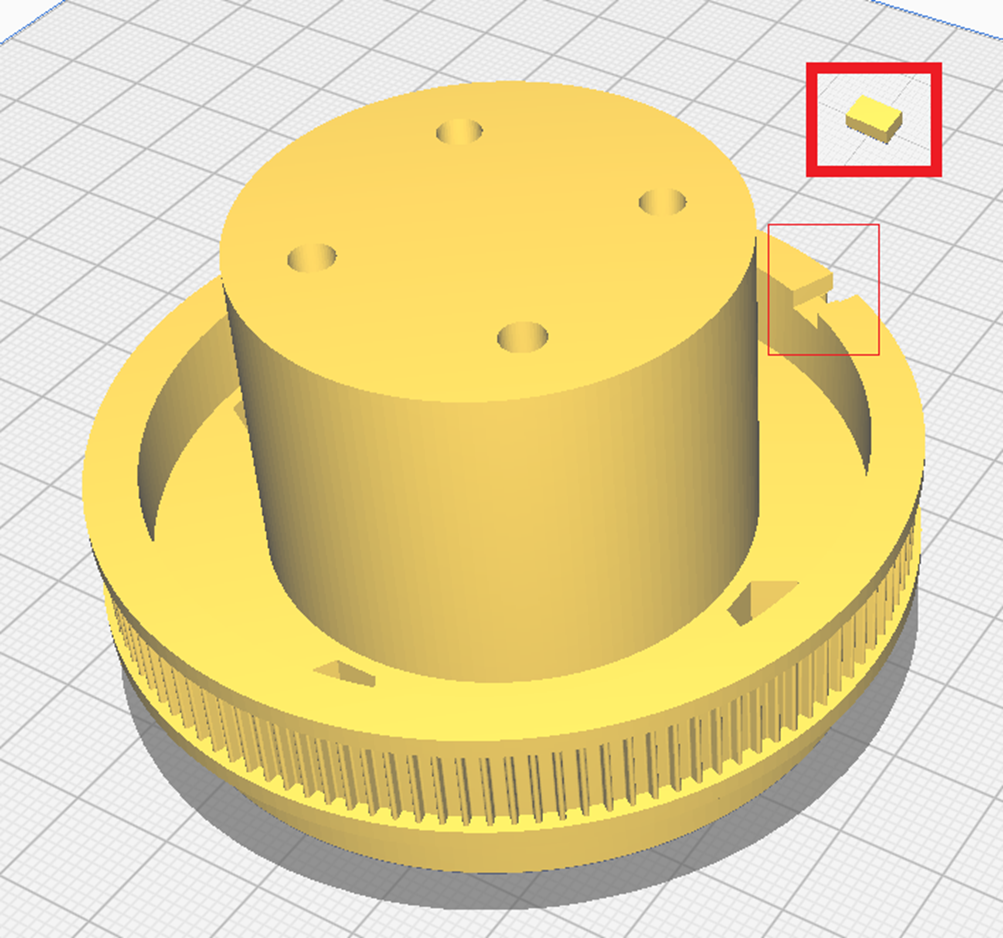
ENGRANAJE PARA EL PRIMER BRAZO
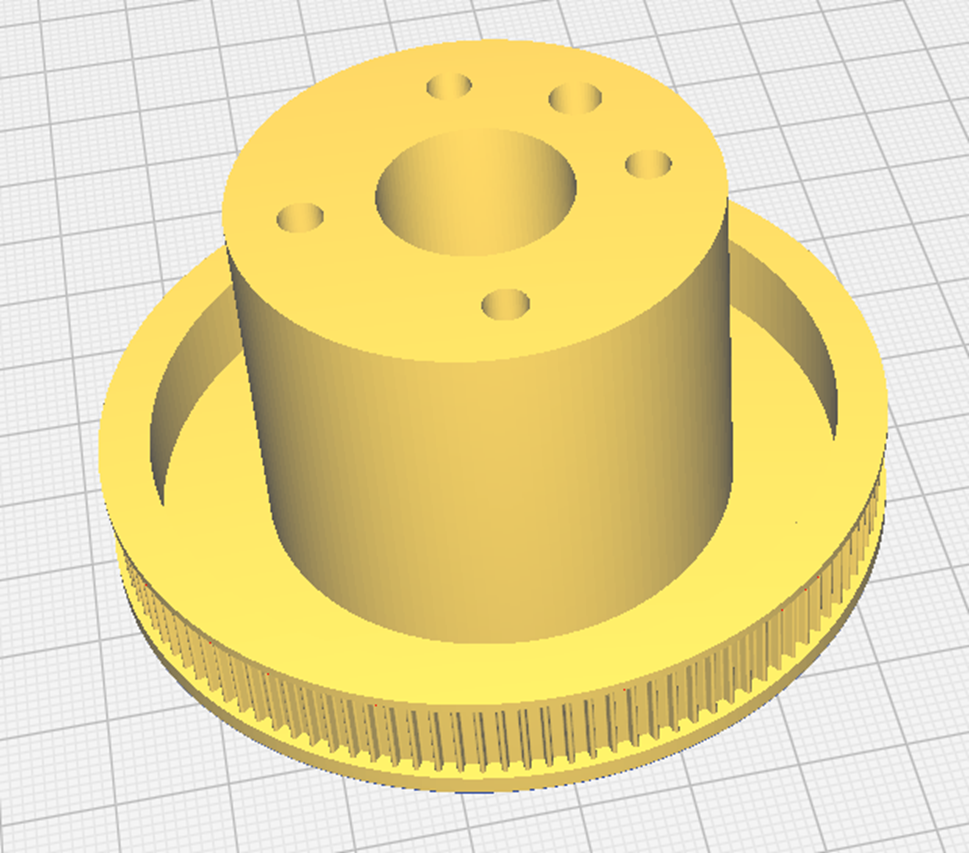
Material : PETG
Relleno : 100%
Soporte : SI – tocando la placa
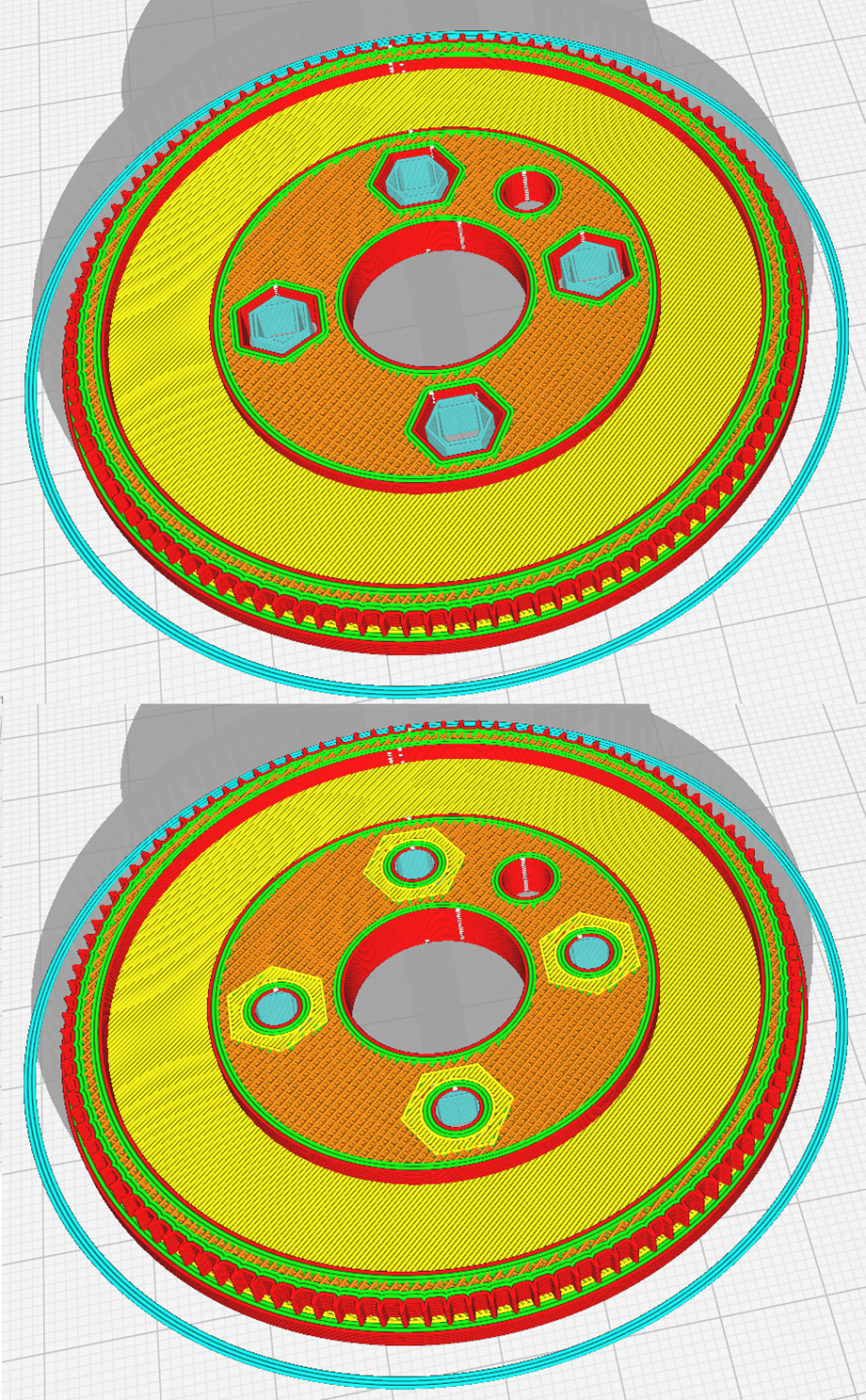
Cuando realizaremos la polea, agregaremos soportes para la parte donde iran colocados las tuercas.
TAPA PRIMER BRAZO
Material : PETG
Relleno : 100%
Soporte : SI – tocando la placa
Robot Scara parte 3 – Segundo Brazo
SEGUNDO BRAZO
Material : PETG
Relleno : 100%
Soporte : SI – tocando la placa
Para imprimir el segundo brazo necesitamos poner soportes ya sea para la parte donde ira colocado el rodamiento y tambien soportes donde se colocaran las tuercas.
ENGRANAJE SEGUNDO BRAZO
Material : PETG
Relleno : 100%
Soporte : NO
TAPA ENGRANAJE BRAZO 2

Material : PETG
Relleno : 100%
Soporte : NO
TAPA SEGUNDO BRAZO
Material : PETG
Relleno : 10%
Soporte : SI – soporte en la base
Robot Scara parte 4 – Movimiento Final Eje Z
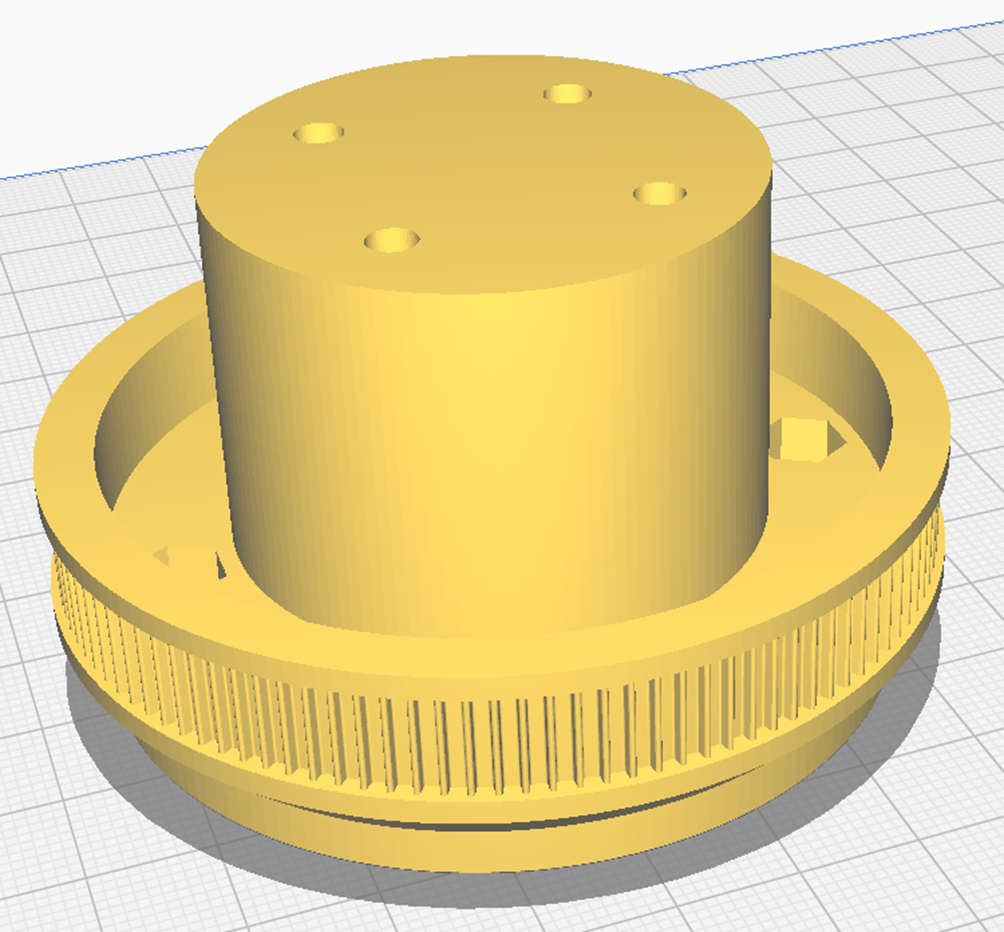
CUERPO POLEA TUERCA T8
Material : PETG
Relleno : 100%
Soporte : NO
PIEZA PARA TENSAR MOTOR 3
Material : PETG
Relleno : 100%
Soporte : NO
PIEZA PARA MONTAR RODAMIENTO LM8UU

Material : PETG
Relleno : 100%
Soporte : NO
SOPORTE MOTOR 3 (EJE Z)
Material : PETG
Relleno : 50%
Soporte : SI – soporte tocando la placa
SOPORTE POLEA MOTOR 3 (EJE Z)
Material : PETG
Relleno : 50%
Soporte : SI – soporte tipo ARBOL
TAPA EJES 8mm
Material : PETG
Relleno : 50%
Soporte : NO
Robot Scara parte 5 – Electrónica
Robot Scara parte 6 – Pruebas de Funcionamiento
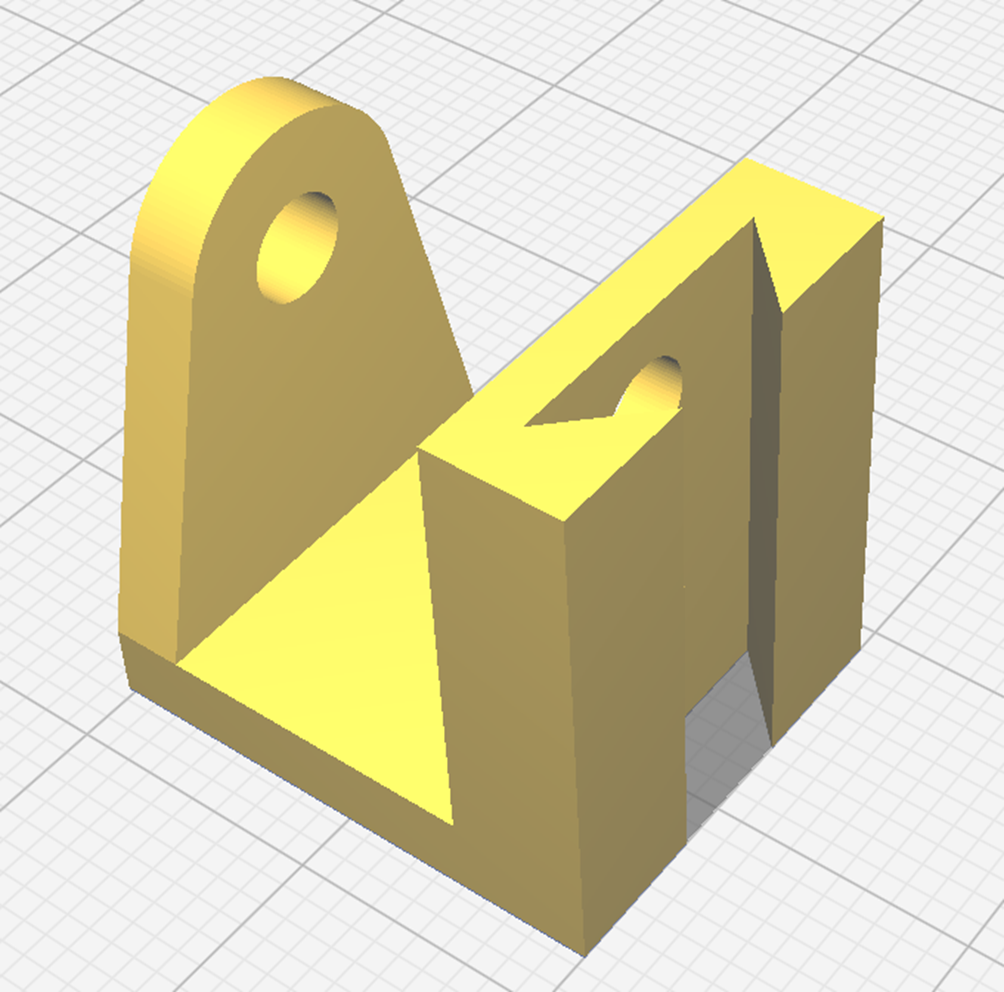
PIEZA PARA FINAL DE CARRERA
Material : PETG
Relleno : 20%
Soporte : NO
Esta pieza, es una pieza rectangular que ira pegada a la polea del brazo 2.
SOPORTE FINAL DE CARRERA EJE Z
Material : PETG / PLA / PLA+
Relleno : 20%
Soporte : NO
SOPORTE FINAL DE CARRERA POLEA 2
Material : PETG / PLA / PLA+
Relleno : 20%
Soporte : NO
Diseño del Robot Scara
Lista de Materiales
Lista de Pernos
| Cantidad | Pernos | Compras por Aliexpress |
|---|---|---|
| 6 | Tornillos Hexagonales Redondos M3 x 30mm (para tapa de la base) | |
| 6 | Tornillos Hexagonales Redondos M2 x 10mm (para los finales de carrera) con sus tuercas) | |
| 2 | Tornillos Hexagonales Redondos M3 x 8mm (para montar la base del segundo final de carrera con el segundo brazo) | |
| 3 | Tornillos Hexagonal Redondo M3 x 25 (para ajustar la correa del primer brazo y segundo brazo) con sus tuercas | |
| 3 | Tornillos Cabeza avellanada M4 x 45 (para acoplar el primer brazo con la polea del primer motor) | |
| 1 | Tornillos Cabeza avellanada M4 x 50 (para acoplar el primer brazo con la polea del primer motor) | |
| 1 | Tornillo cabeza avellanada M4 x 30mm (para los rodamientos de la correa en el brazo 1) | |
| 4 | Tornillos Cabeza avellanada M4 x 60mm (para acoplar el segundo brazo) | |
| 4 | Tornillos Cabeza avellanada M4 x 16mm (para acoplar el segundo brazo) | |
| 4 | Tornillos Cabeza avellanada M4 x 50mm (para acoplar pieza impresa en 3D del eje Z con el segundo brazo) | |
| 1 | Tornillo cabeza avellanada M4 x 25mm (para los rodamientos de la correa en el brazo 2) | |
| 8 | Tornillos Cabeza avellanada M3 x (8 o 10mm de largo) llave allen (para motores montados en la base) | |
| 12 | Tornillos Cabeza avellanda M3 x 5mm (para montar la tapa del primer y segundo brazo) | |
| 2 | Tornillos Cabeza avellanada M3 x 16mm de largo (para colocar los rodamientos en los tensores de las correas) | |
| 4 | Tornillos Cabeza avellanada M3 x 20mm (para acoplar Tuerca T8 con polea impresa en 3D) | |
| 4 | Tornillos Cabeza avellanada M3 x 10mm (para montar motor nema 17 en la base) | |
| 1 | Tornillo Cabeza avellanada M3 x 18 (para montar los rodamientos con el tenzo del motor nema 17 del eje Z) | |
| 4 | Tornillos Socket M3 x 25mm (para montar base del motor nema 17 con el segundo brazo) | |
| 20 | Tuercas autoblocantes M4 (para la polea impresa en 3D del primer motor y para la tapa que acopla el primer con el segundo brazo mediante la segunda polea hecha con impresion 3D) | |
| 1 | Tuerca Autoblocante M3 (para el tensor del eje Z) | |
| 50 | Tuercas normales M3 | |
| 50 | Arandelas M3 | |
| 50 | Arandelas M4 | |
| 20 | Tuercas normales M5 | |
| 20 | Tuercas M2 | |
| 5 | Prisioneros m3 x 10mm (para acople de motores con la base) |
10 respuestas a «Como hacer un Robot Scara»
-
Hola buenas noches, disculpa siguiendo este diseño sería factible que se alargara el brazo del centro para que tuviera un poco más de alcance el robot como por ejemplo, para una banda transportadora?
-
si claro que puedes alargar el brazo, te recomendaria no alargarlo mas de 10cm ya que con el peso que hay en el segundo brazo tendera a pandearse.
-
-
Hola, ¿puedes proporcionarnos un archivo stl?
-
todos los archivos estan publicados en mi patreon con un costo de 8$
-
-
Hola buenas tardes para un proyecto final me pidieron desarrollar una aplicacion de pick and place con un robot scara, viendo tu diseño me interesa bastante, pero como soy un poco nueva en este mundo no se si cumpla con los requisitos, existira un tablero de 25cm por 25cm y aleatoriaamente pondran fichas o de metal o maderaa y el robot de manera autonoma tendra que clasificarlas , pero no se si este diseño sea ideal para esas dimensiones o esa aplicación, no se si me podrias orientar antes de compraar los materiales y los planos.
-
Hola Buenas tardes, este robot scara esta diseñado para que tenga un espacio de trabajo de hasta 18cm de radio desde el punto centro del robot, lo cual no es factible para el proyecto que tu estas realizando, muy aparte a eso, la programacion realizada es basica y en tu caso tendrias que tener un camara para que pueda diferenciar el material y poder casificarlos o en todo caso como tendrias pensado clasificar las fichas?
-
-
RESPECTO A PROGRAMA COMO LO ADQUIERO
-
el programa realizado es basico en arduino.
-
-
Hola buenas noches, me gustaría preguntarle, si en algún momento la universidad nos permite pasar este robot como proyecto de grado,los derechos de autor son necesarios incluirlos o al hacer modificaciones y el pago de suscripción, no sería necesario incluir esto? Saludos desde de Colombia
-
hola Vanessa,
No es necesario, pero si deseas incluir los derechos de autor, nos estarias ayudando a que otras personas puedan ver los proyectos que hemos realizado en esta pagina.
-
10 comentario en “Como hacer un Robot Scara”
-
-
si claro que puedes alargar el brazo, te recomendaria no alargarlo mas de 10cm ya que con el peso que hay en el segundo brazo tendera a pandearse.
-
-
Hola, ¿puedes proporcionarnos un archivo stl?
-
todos los archivos estan publicados en mi patreon con un costo de 8$
-
-
Hola buenas tardes para un proyecto final me pidieron desarrollar una aplicacion de pick and place con un robot scara, viendo tu diseño me interesa bastante, pero como soy un poco nueva en este mundo no se si cumpla con los requisitos, existira un tablero de 25cm por 25cm y aleatoriaamente pondran fichas o de metal o maderaa y el robot de manera autonoma tendra que clasificarlas , pero no se si este diseño sea ideal para esas dimensiones o esa aplicación, no se si me podrias orientar antes de compraar los materiales y los planos.
-
Hola Buenas tardes, este robot scara esta diseñado para que tenga un espacio de trabajo de hasta 18cm de radio desde el punto centro del robot, lo cual no es factible para el proyecto que tu estas realizando, muy aparte a eso, la programacion realizada es basica y en tu caso tendrias que tener un camara para que pueda diferenciar el material y poder casificarlos o en todo caso como tendrias pensado clasificar las fichas?
-
-
RESPECTO A PROGRAMA COMO LO ADQUIERO
-
el programa realizado es basico en arduino.
-
-
Hola buenas noches, me gustaría preguntarle, si en algún momento la universidad nos permite pasar este robot como proyecto de grado,los derechos de autor son necesarios incluirlos o al hacer modificaciones y el pago de suscripción, no sería necesario incluir esto? Saludos desde de Colombia
-
hola Vanessa,
No es necesario, pero si deseas incluir los derechos de autor, nos estarias ayudando a que otras personas puedan ver los proyectos que hemos realizado en esta pagina.
-
Deja una respuesta